Beparkolás-segítő rendszer működése
Park Assist 1.0-1.5 (Passat B6, Passsat CC)
- Bevezető
- Felépítés
- A Park Assist funkciója
- Elektromos komponensek
- Működési ábra
Park Assist 2.0 (Passat B7)
- Felépítés
- Működési mód
- Elektromos komponensek
Park Assist 3.0 (Passat B8, B8 Facelift)
- Bevezető
- Rendszerműködés
Park Assist Plus (Passat B9)
- Ismertető
- A parkolási folyamat menete
- Parkolási memóriafunkció
- Park Assist Pro: Távirányítású parkolás
- Összegzés és kitekintés
Bevezető
A Volkswagen ParkAssist (PLA) a 2007-es Tourannal került bevezetésre.
A hagyományos, ultrahangos parkolóradarra (PDC) épül, de egy lényeges pluszt ad: aktívan átveszi a kormányzást.
Míg a hagyományos radar vagy tolatókamera csak jelez, a ParkAssist a tolatásos manőver közben automatikusan forgatja a kormányt. A vezető feladata kizárólag a pedálok (gáz, fék, kuplung) kezelése és a sebességváltó kapcsolása. A rendszer nem veszi ki teljesen az irányítást a kézből, a sofőr bármikor felülbírálhatja (belemozdít a kormányba vagy fékez), ezzel azonnal leállítva az automatikát.
A funkció az út jobb és bal oldalán lévő helyeket is felismeri.
Rendszer-összehasonlítás
| Jellemzők | Park Assist 1.0 - 1.5 (2007-től) |
Park Assist 2.0 (2011-től) |
Park Assist 3.0 (2015-től) |
Park Assist Plus (2021-től) |
Park Assist Pro (Opcionális) |
|---|---|---|---|---|---|
| Érzékelők (Szenzorok) | 6 jeladó elől 4 jeladó hátul |
6 jeladó elől 6 jeladó hátul |
12 továbbfejlesztett jeladó (4m hatótáv) |
12 db MEB-platform alapú szenzor (8 PDC + 4 oldalsó PLA) + Area View kamerák (Pro esetén kötelező) |
|
| Beavatkozás szintje | Csak kormányzás | Kormányzás + ESP fékezés | Kormányzás + Automatikus vészfékezés | Teljesen autonóm (Kormány, Gáz, Fék, Váltó/Irányjelző) |
|
| Parkolási módok | Párhuzamos tolatva | Párhuzamos és Merőleges tolatva | Párhuzamos, Merőleges tolatva, és orral előre | Minden mód + Memória funkció | Minden mód + Távirányítás (App) |
| Manőverezési képesség | Hossz: Autó + 1.4m | Hossz: Autó + 0.8m Többlépcsős |
Még szűkebb helyek Max. 10 korrekciós lépés |
Önálló beállás mentett helyre (50m) | Kiszállás utáni be/kiállás okostelefonnal |
Rendszerkövetelmények (A Park Assist alapjai)
A ParkAssist rendszerrel felszerelt járműveknek a következő műszaki követelményeknek kell megfelelniük:
- Elektromechanikus szervokormány (Electromechanical Power Steering - EPS)
- ESP fékrendszer
Megkülönböztetés a parkolóradar és a kormányzási funkció között
A ParkAssist két fő funkcióval rendelkezik:
- A PDC (Park Distance Control) parkolóradar rendszer, amelyet parkolássegítő rendszerként is ismerünk.
- Az aktív parkolási folyamatot végrehajtó parkolási kormányzási funkció.
PDC (Park Distance Control) parkolóradar rendszer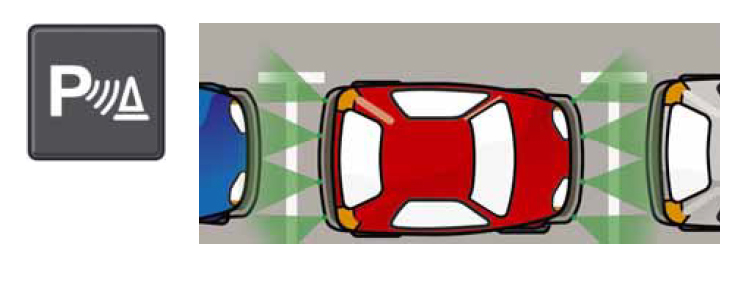
A PDC rendszer négy ultrahangos érzékelőt használ elöl és négyet hátul azzal a céllal, hogy mérje a távolságot a jármű előtt és mögött lévő tárgyaktól. Amennyiben a jármű egy meghatározott távolságra közelíti meg a tárgyat, akusztikus figyelmeztetés hangzik el.
Ha a jármű kizárólag parkolássegítővel van felszerelve, a PDC funkciót a J446 parkolássegítő vezérlőegység vezérli. Ez az egység normál esetben a csomagtartóban van elhelyezve.
Parkolási kormányzási funkció
A PDC érzékelőkön felül a ParkAssist rendszer a jármű mindkét első oldalán egy-egy további ultrahangos szenzorral rendelkezik. Ezeket a szenzorokat arra használja, hogy a jármű melletti területeket átvizsgálja és parkolóhelyet keressen.
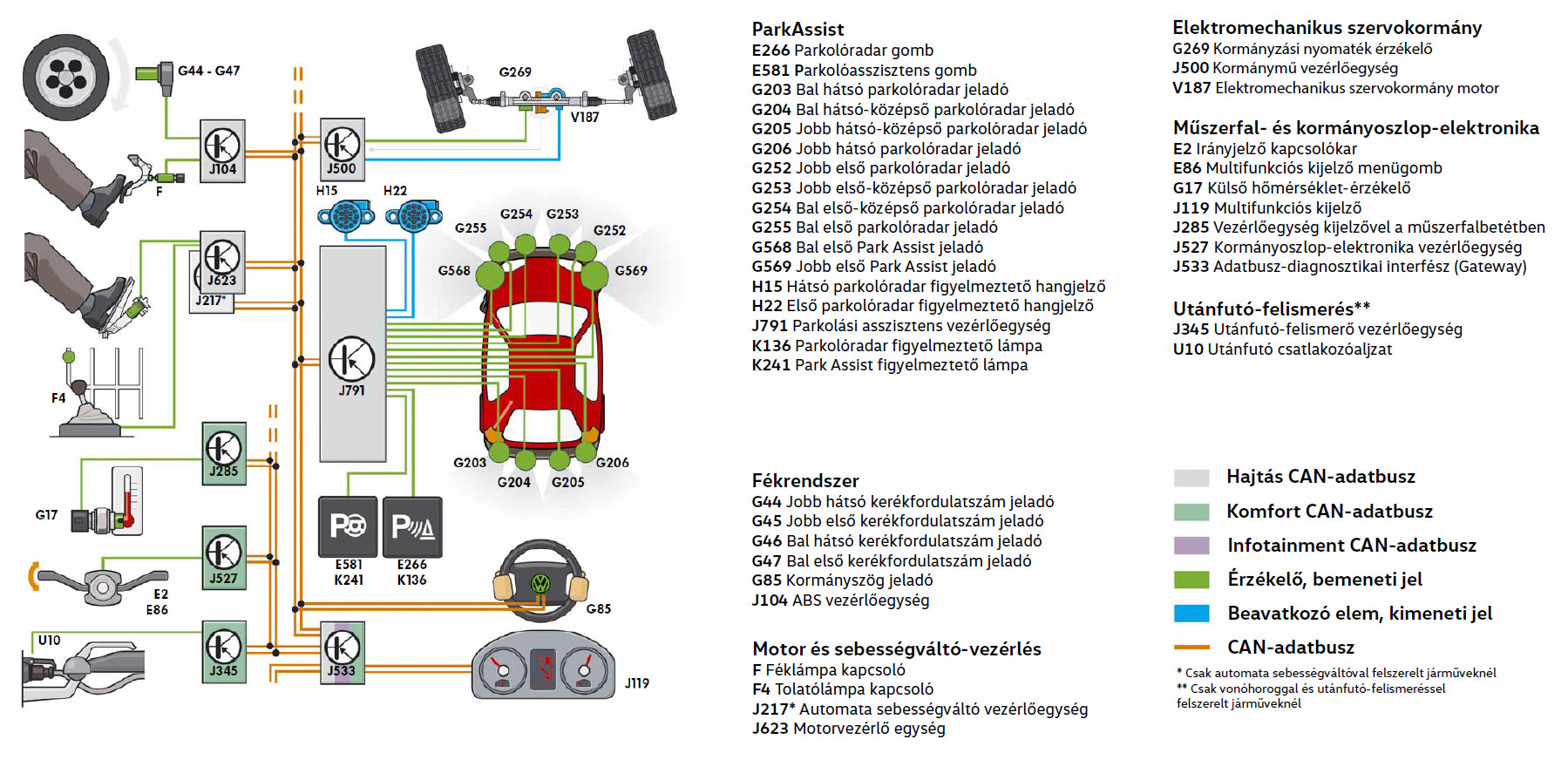
Rendszerelemek és elhelyezkedésük áttekintése
A ParkAssist rendszert a 2007-es Touran modellel vezették be.
Az ábrán a ParkAssist rendszer PDC és parkolási kormányzási funkciójának végrehajtásához szükséges komponensek elhelyezkedése látható.

Fontos, hogy a J791 párhuzamos parkolási asszisztens vezérlőegység a kormányoszlop bal oldalán van beépítve. Ez az egység vezérli a parkolóradart és a parkolási kormányzási funkciót is, és hálózatba van kötve a hajtás CAN-adatbuszával.
Amennyiben egy jármű fel van szerelve ParkAssist rendszerrel, abban nem lesz különálló parkolóradar vezérlőegység (PDC).
Az eltérő járműtípusoknál a rendelkezésre álló hely miatt a komponensek, különösen a vezérlőegységek elhelyezkedése különbözhet.
Rendszerséma
A ParkAssist rendszer kiváló példa a különböző jármű alrendszerek CAN-adatbusz rendszeren keresztüli együttműködésére, egy olyan összetettebb funkció megvalósítása érdekében, mint a beparkolási kormányzási funkció.
A beparkolási kormányzást segítő rendszeren felül a következő alrendszerek vesznek részt az együttműködésben:
- az elektromechanikus szervokormány
- az ABS-szel és ESP-vel ellátott fékrendszer
- a motor- és sebességváltó-vezérlés
- a műszerfal és a kormányoszlop-elektronika
- az utánfutó-felismerés (amennyiben be van építve)
Az alábbi rendszer következő komponensei működnek együtt a beparkolási funkcióban:
Elektromechanikus szervokormány
Az elektromechanikus szervokormány (EPS) a ParkAssist rendszer működtetésének egyik alapvető előfeltétele.
Ez teszi lehetővé a párhuzamos parkolási asszisztens vezérlőegysége számára, hogy a szervokormány elektromos meghajtásának felhasználásával aktívan és automatikusan kormányozzon.
A következő szakasz áttekintést nyújt az elektromechanikus szervokormány felépítéséről és működéséről.
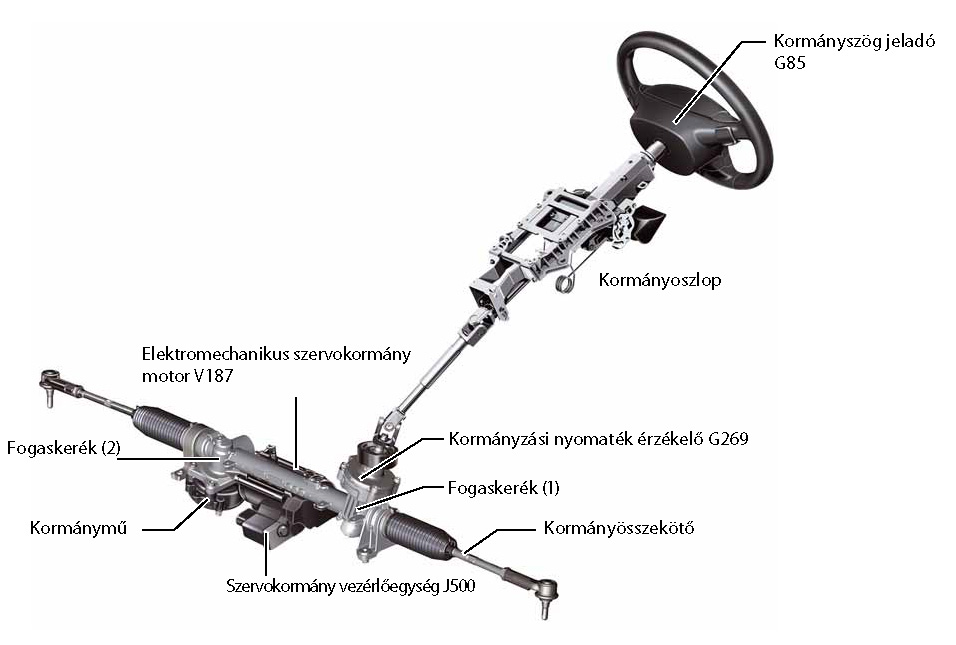
Az elektromechanikus szervokormány a hidraulikus rásegítésű kormánymű alternatívája.
Felépítése a következő:
- kormánymű fogasléc
- elektromechanikus szervokormány motor
- kormányzási nyomaték érzékelő és a szervokormány vezérlőegysége.
Ennek a szervokormány rendszernek az egyik különlegessége, a kettős fogaskerék (double pinion) kialakítása a kormányműben.
Az egyik fogaskerék (1) felel a kormánykerék forgó mozgásának átviteléért a kormánymű csatlakozó elemeire (steering linkage).
Egy nyomatékérzékelő (torque sensor) érzékeli a vezető által kifejtett kormányzási nyomatékot.
A második fogaskerék (2) az elektromos motor hajtóerejét továbbítja a fogasléceken keresztül a kormánymű csatlakozó elemeire.
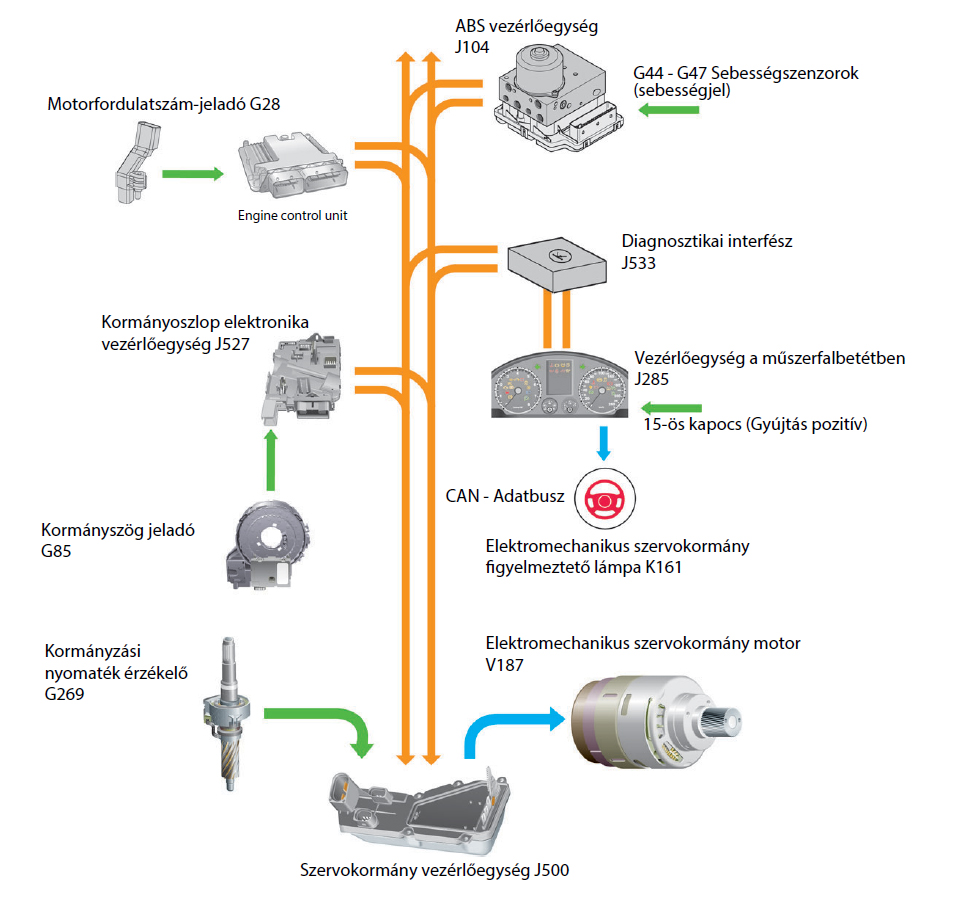
Az elektromechanikus szervokormány vezérlőegysége magán az elektromos motoron helyezkedik el, ami leegyszerűsíti a kábelezést. A vezérlőegységet a kormánykerék helyzetéről és a vezető által kifejtett fordítási sebességről a kormányelfordulás-érzékelő (steering angle sender) tájékoztatja.
Az egység adatait közvetlenül a Hajtáslánc CAN (Drive Train CAN) adathálózaton keresztül küldi, és azt használja például az ESP vezérlőegység is.
Karakterisztikai görbék és térkép
A kormányrásegítést a sebesség függvényében szabályozzák, a vezérlőegység tartós programmemóriájában tárolt úgynevezett "térkép" (map) alapján.

A jármű súlya és felszereltsége miatt a térképet csak a járműgyártás végső fázisában, a gyárban programozzák be a vezérlőegységbe.
A térkép azonban javítási munkálatokat követően (például ha a kormányművet kicserélték) a szervizben is beprogramozható. Ehhez speciális járműdiagnosztikai műszert kell használni.
A megfelelő térkép egy járműspecifikus PR-szám alapján importálható, amely a Volkswagen gyártók járműadat matricáján található.
Az elektromechanikus szervokormány sematikus ábrája
A kormányrásegítés folyamata
A kormányrásegítő funkció akkor lép működésbe, amikor a vezető elfordítja a kormánykereket. Az általa kifejtett nyomaték elcsavarja az elektromechanikus szervokormányban található torziós rudat.
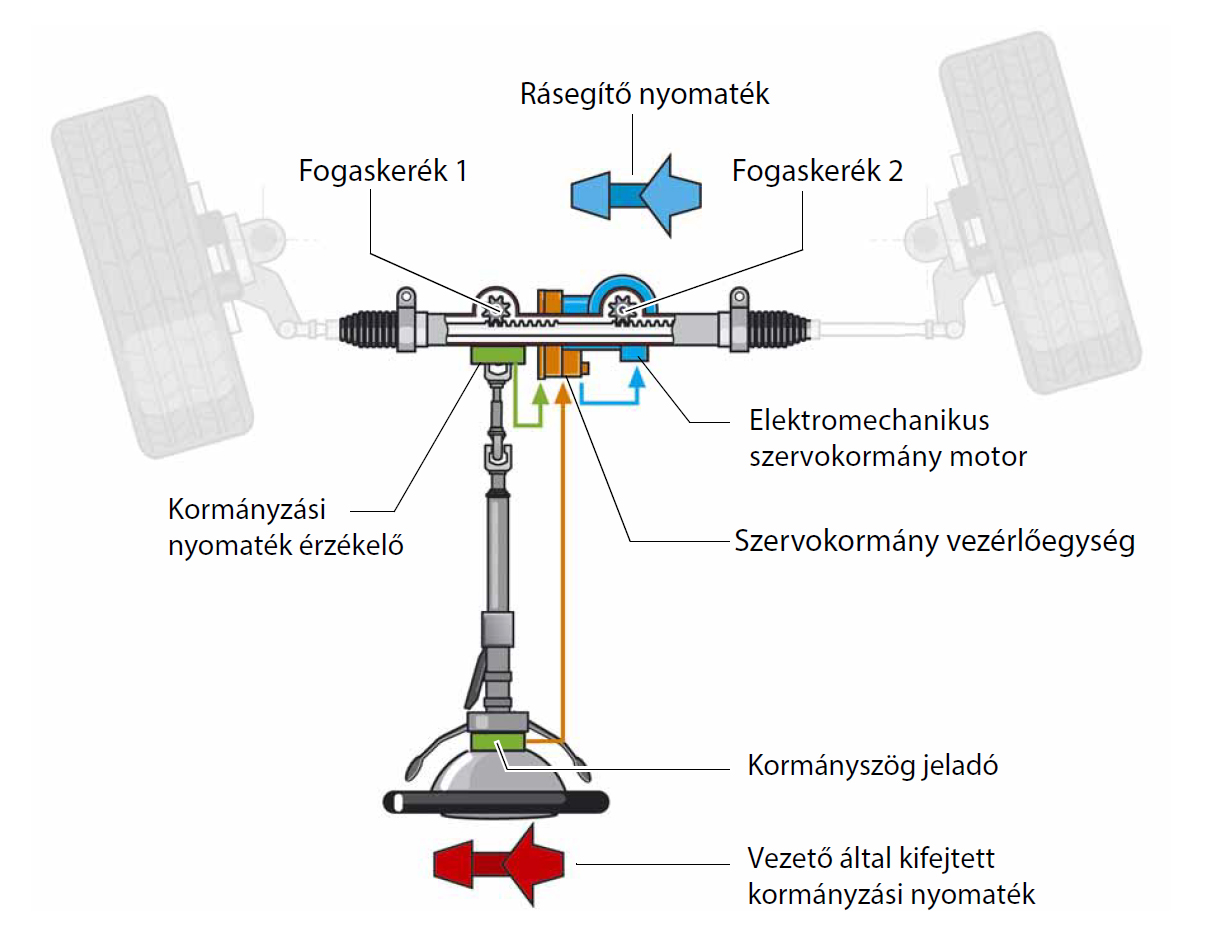
Ezt a jelenséget a kormányzási nyomaték érzékelő (steering moment sender) méri, és jelként elküldi a szervokormány vezérlőegységének (power steering control unit). Ugyanakkor a vezérlőegység a kormányszög jeladótól (steering angle sender) kapott információkat felhasználva kiszámítja, hogy a vezető milyen sebességgel forgatta el a kormányt, valamint annak aktuális helyzetét. A szervokormány vezérlőegység az összes beérkező adat alapján határozza meg a szükséges kormányrásegítő erőt.
A vezérlőegységben tárolt karakterisztikai görbék segítségével működteti az elektromos motort, amely a szükséges kormányrásegítő nyomatékot a fogasléceken keresztül átviszi a kormányösszekötő elemekre.
A Park Assist funkciója
A parkolási eljárás
A ParkAssist segítségével történő tolatva parkolás négy szakaszra bontható:
1. A ParkAssist aktiválása
2. Megfelelő parkolóhely keresése
3. Parkolás a parkolási kormányzási funkció segítségével
4. A parkolási eljárás befejezése
1. A ParkAssist aktiválása
A ParkAssist parkolási távolságellenőrző és parkolási kormányzási funkciókkal rendelkezik. Mindkét funkció külön kapcsolókkal aktiválható és deaktiválható. Amikor a rendszer aktív, a gombban lévő figyelmeztető lámpa világít, és megjelenik egy kijelzés a műszerfal betétben található többfunkciós kijelzőn. 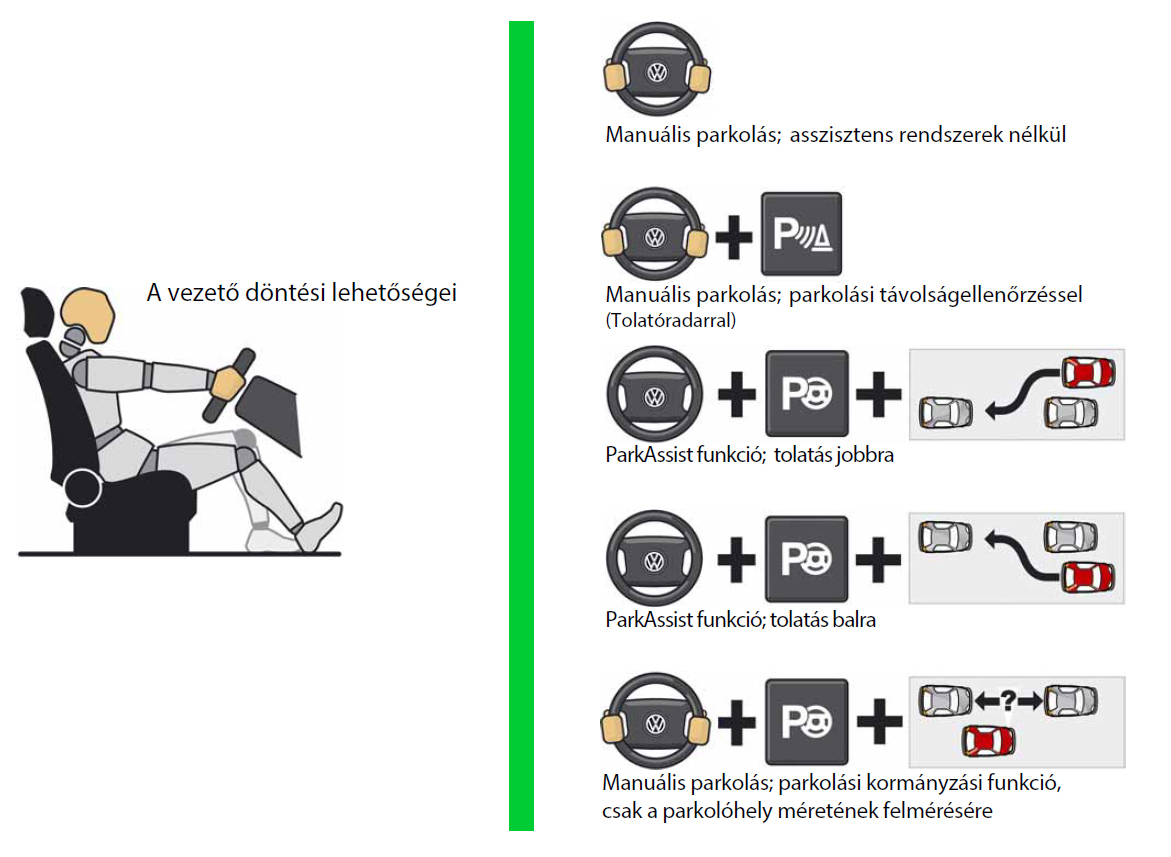
Tolató parkolás esetén nem szükséges előre eldönteni, hogy Ön maga akarja-e elvégezni a parkolási manővert, a parkolási távolságellenőrző rendszert használni, vagy a kormányzást a ParkAssist-ra bízni. Ez utóbbi esetben mindössze a gáz-, kuplung- és fékpedált kell kezelnie. El kell döntenie, hogy az út jobb oldalán lévő parkolóhelyre kíván beállni, vagy egy egyirányú utcában a bal oldali helyre. Természetesen arra is van lehetőség, hogy a ParkAssist-ot csak a parkolóhely felmérésére használja. Ebben az esetben a mérés befejezése után ki kell kapcsolnia a rendszert. A leírás ezen részében feltételezzük, hogy a vezető a ParkAssist rendszerrel kíván beállni az út jobb oldalán lévő parkolóhelyre, ezért megnyomja a ParkAssist gombot.
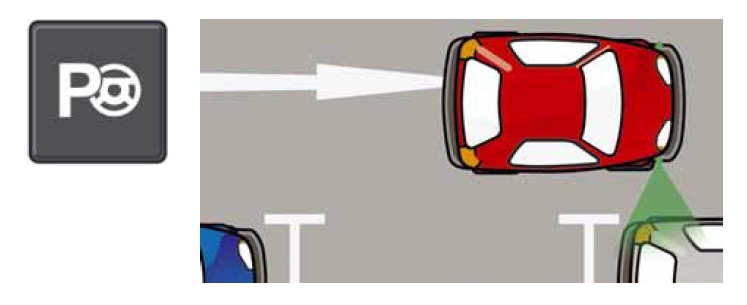
2. Megfelelő parkolóhely keresése
A megfelelő méretű parkolóhely felmérésének folyamatát a jármű mindkét oldalán ultrahangos érzékelőkkel végzi a rendszer. A mérést az első jobb oldali jeladó végzi a parkoló asszisztens kormányzáshoz, a jármű jobb oldalán.
A parkolóhely felméréséhez a jármű sebességének 30 km/h alatt kell lennie. A ParkAssist érzékelők 30 km/h és 45 km/h közötti sebességnél inaktívak. Ekkor a rendszer készenléti üzemmódba (stand-by mode) vált, mivel feltételezi, hogy a keresési eljárás csak megszakadt, és egy későbbi ponton folytatódik.
45 km/h feletti sebességnél a ParkAssist teljesen kikapcsol, és újra aktiválni kell.
Ha a sebesség 30 km/h alatt van a parkolóhely keresése közben, és a járdaszegélytől, amely mellett az autó elhalad, mért távolság nagyobb mint 0,5 m és kisebb mint 1,5 m, a ParkAssist felméri az út jobb oldalát egy megfelelő parkolóhely keresése céljából. Az eljárás eredménye a vezető számára a műszerfali kijelzőn jelenik meg egy grafikával, amely az autót és az út szélét ábrázolja.
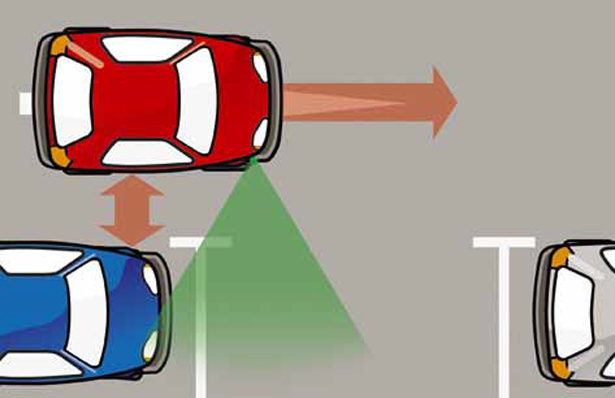
Ha a rendszer azt észleli, hogy a jármű a járdaszegélyhez vagy a parkoló autók sorához képest meghaladja a 20°-os elhaladási szöget (passing angle), a ParkAssist feltételezi, hogy a vezető például másik utcába kíván bekanyarodni, és leállítja a keresési eljárást.
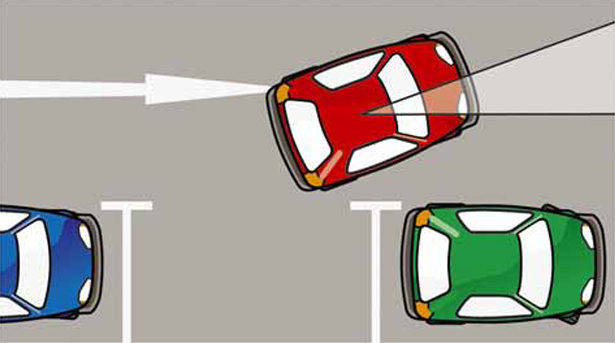
Az elhaladási szög meghatározásához a ParkAssist több vonalat is monitorozhat, és összehasonlíthatja azokat a jármű hossztengelyével:
1. a parkoló autók által alkotott vonal.
2. a járdaszegély.
3. falak.
Csak a járműhöz legközelebb eső vonalat használja a rendszer.
Ez megakadályozza a téves értelmezéseket, például ha a járdaszegély és a falak nem párhuzamosak
Ha a rendszer nem talál elegendően nagy parkolóhelyet, az út oldala árnyékolt téglalapok sora formájában jelenik meg. Ha egy parkolóhely elég nagy, az az árnyékolt téglalapok közötti szabad térként látható. Ezzel egyidejűleg a rendszer ellenőrzi, hogy a jármű a megfelelő helyzetben van-e a parkolóhelyre való beálláshoz. Ez azt jelenti, hogy a járművet elég messzire előre hajtották a tolatáshoz, és a jármű hossztengelye párhuzamos a parkolóhellyel vagy az út szélével.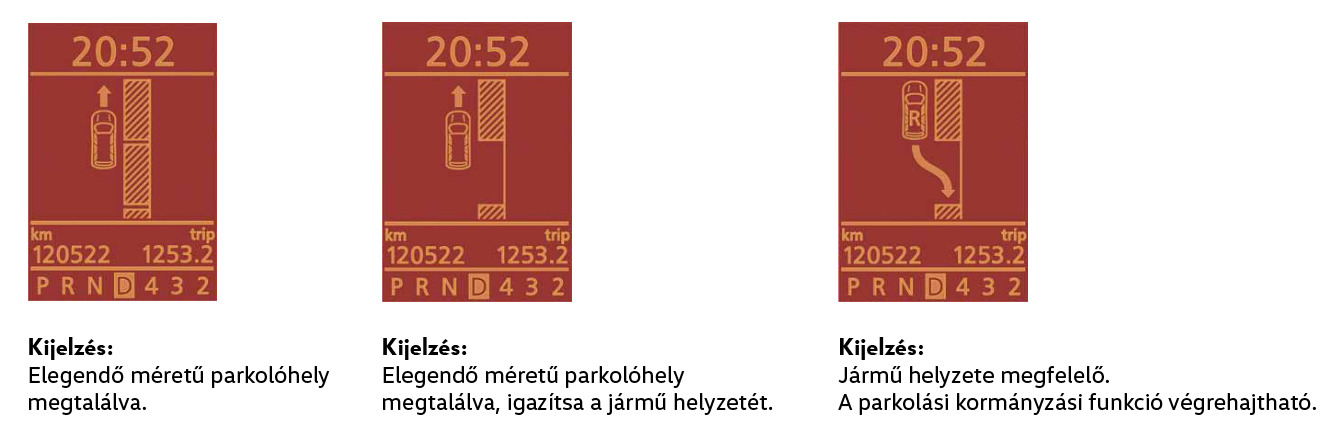
Amint elérték a megfelelő pozíciót, egy nyíl mutat a parkolóhely irányába, jelezve, hogy a ParkAssist készen áll a parkolási kormányzási funkció végrehajtására.
Ez azonban csak akkor történik meg, ha a jármű álló helyzetben van.
A jármű ikonban látható "R" betű azt jelzi, hogy a vezetőnek magának kell hátrameneti fokozatot választania.
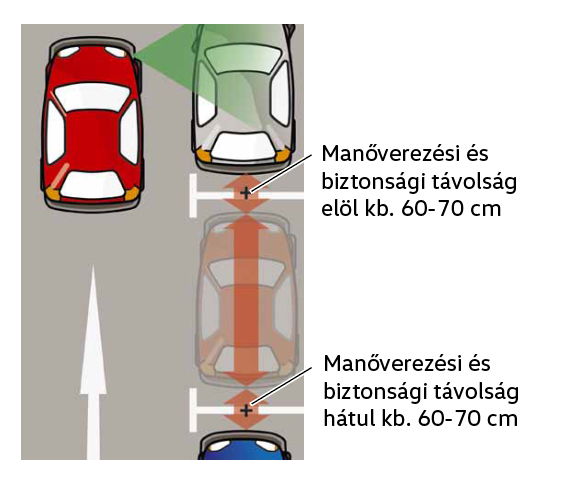
A parkolóhely minimális méretét a jármű hossza, a szükséges manőverezési tér, plusz egy biztonsági távolság határozza meg. A teljes hosszt úgy mérik, hogy a jármű egyetlen parkolási eljárással beparkolható legyen.
Ez azt jelenti, hogy a ParkAssist úgy tudja pozícionálni a járművet, hogy a vezetőnek csak manuálisan előre kell hajtania ahhoz, hogy optimális helyzetet érjen el a parkolóhelyen.
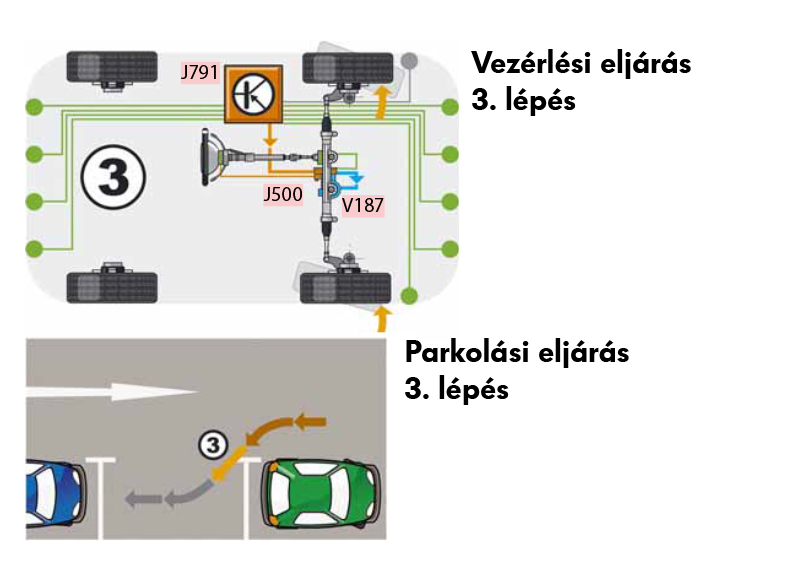
3. Beparkolás a parkolási kormányzási funkció segítségével
A vezető az automatikus parkolási folyamatot a hátrameneti fokozat kiválasztásával, a gázpedál lenyomásával és a fékpedál felengedésével indítja el, miközben a jármű álló helyzetben van. A kormánykerékre nem szabad semmilyen kormányzási nyomatékot kifejtenie.
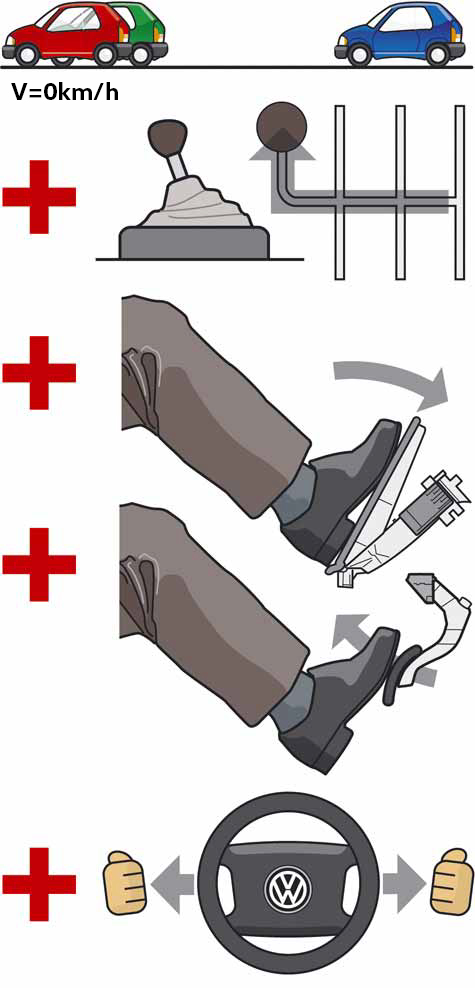
A műszerfal betét kijelzője ekkor tájékoztatja a vezetőt arról, hogy a rendszer átveszi a kormányzást, és a vezetőnek figyelnie kell a jármű környezetét, hogy kétség esetén vagy veszélyhelyzetben meg tudja szakítani a parkolási eljárást.
A megjelenített üzenet a következő:
„Steering interv. active! Monitor area around veh.!” / „Kormányzás átvéve! Figyelje a jármű környezetét!”
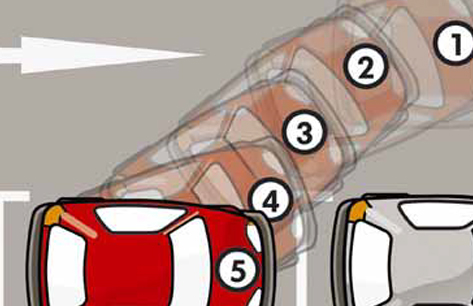
A parkolóhelyre tolatás manőverezési folyamata a párhuzamos parkolási asszisztens vezérlőegységében öt mozgási szakaszra oszlik.
Ez azért szükséges, mert a rendszer nem rendelkezik közvetlen optikai ellenőrzési lehetőséggel, hogy reagálni tudjon a manőver közbeni váratlan eseményekre. Egyszerűbben fogalmazva, a vezérlőegységben egy standard parkolási manőver van tárolva, és azt játssza le öt lépésben, amikor arra szükség van.
A ParkAssist így egy előre beállított célútvonalat követ az egyes lépések felhasználásával.
1. Először a kerekek kiegyenesednek, és a jármű egy rövid távolságot tolat, amikor a vezető lenyomja a gázpedált és felengedi a féket.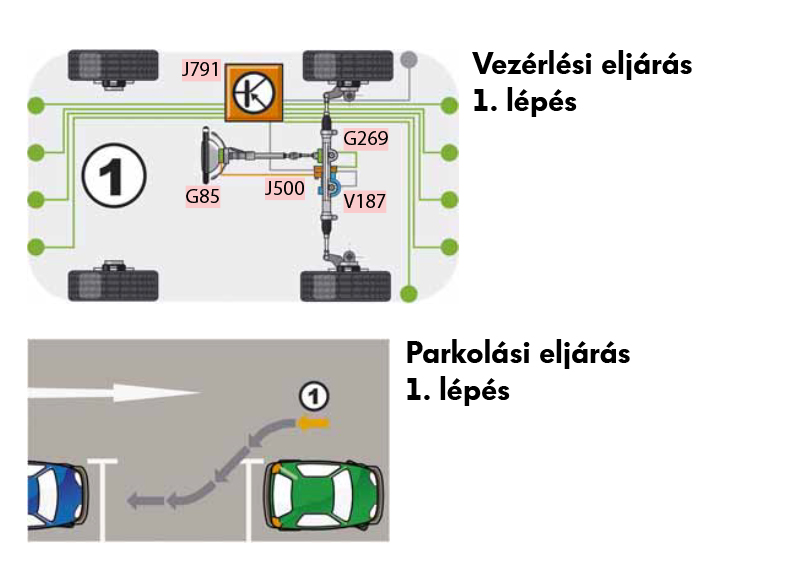
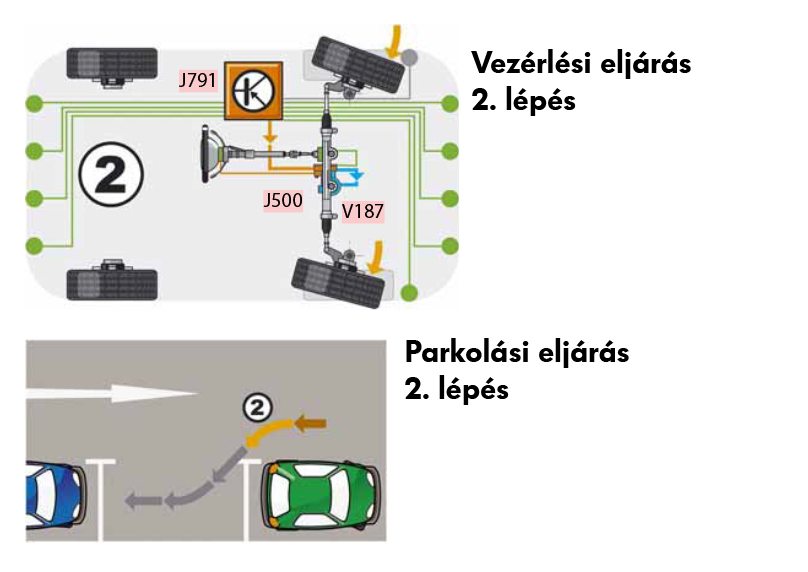
2. A párhuzamos parkolási asszisztens vezérlőegysége ezután parancsot ad az elektromos motornak, hogy fordítsa el a kerekeket jobbra. A jármű ekkor szögben tolat be a parkolóhelyre.
A vezetőnek a sebességet 7 km/h alatt kell tartania. Ha túllépi ezt a sebességértéket, a rendszer megszakítja az eljárást.
3. Az ultrahangos érzékelőktől származó távolsági adatok és a kormányszög jeladótól érkező adatok felhasználásával a ParkAssist ellenőrzi a jármű helyzetét a parkolóhelyhez képest, és a párhuzamos parkolási asszisztens vezérlőegységében tárolt manőverezési lépések segítségével meghatározza, mikor kell a kerekeket egyenes állásba visszatéríteni a parkolóhelyre való további behatoláshoz.